Planetengetriebe
aus Wikipedia, der freien Enzyklopädie
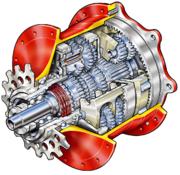
Ein Planetengetriebe (manchmal auch Planetenradgetriebe genannt) ist eine spezielle Bauform eines Zahnrad-Getriebes. Es verfügt über eine charakteristische kompakte Bauform mit drei oder mehr, meist koaxial angeordneten Wellen. Prinzipiell kann man davon zwei oder mehr Wellen antreiben und eine als Abtrieb verwenden (Summiergetriebe), oder man treibt eine Welle an und verzweigt die Leistung auf zwei oder mehr Abtriebe.
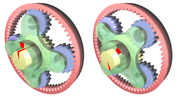
Die grundlegende Bauart besteht aus einem Zahnradsatz, der von innen nach außen aus dem Sonnenrad, den von dem Planetenträger (auch „Steg“ genannt) getragenen Planetenrädern und dem Hohlrad mit Innenverzahnung besteht.
Merkmale


Grün: Sonnenrad, Blau: Planetenräder, Rot: Hohlrad
Charakteristisch für Planetengetriebe ist die Standübersetzung i12, mit der Planetengetriebe unterschiedlichster Bauarten verglichen werden können. Wenn zwei Planetengetriebe gleicher Bauart die gleiche Standübersetzung haben, sind sie kinematisch gleichwertig. Alle anderen Übersetzungen sind dann ebenfalls gleich.
Zwischen der Standübersetzung i12 und den Drehzahlen n von Sonnen-, Steg- und Hohlradwelle besteht der folgende mathematische Zusammenhang:

Die Standübersetzung ist anschaulich deutbar als die Übersetzung von Hohlradwelle zur Sonnenradwelle bei festgehaltenem Steg (Fall ns = 0). Sie ist negativ, wenn bei Antrieb eines Rades das andere entgegengesetzt dreht. Da man bei der Berechnung von i das Verhältnis von großem zu kleinem Rad ebenso wie das Verhältnis von kleinem zu großem Rad als i angeben kann, wird i stets so gewählt, dass es betragsmäßig größer als 1 wird.
Die Bedeutung der Standübersetzung kann man sich mit einer Erklärung von Willis anschaulich machen: Jeder Bewegungszustand des Planetengetriebes lässt sich darstellen, wenn man sich die Bewegung aus der Standübersetzung i mit festgehaltenem Steg vorstellt und sich dann überlegt, dass man danach auch noch den Steg drehen kann.
Die Standübersetzung lässt sich durch die Zähnezahlen S, H von Sonnenrad und Hohlrad berechnen:

Bei einem Hohlrad ist die Zähnezahl negativ definiert, so dass auch hier i negativ wird und die Drehrichtungsumkehr bei festgehaltenem Steg anzeigt.
Bei einem Planetengetriebe sind alle Räder ständig im Eingriff. Durch die Wahl des Antriebes und des Abtriebes bzw. des Abbremsens oder Kuppelns kann die Übersetzung gewechselt werden.
Das Hohlrad weist eine Innenverzahnung auf. Zudem führt die Anzahl der Planetenräder zu einer Leistungsverzweigung. Diese beiden Merkmale bewirken, dass die mechanische Belastbarkeit des Getriebes gesteigert bzw. das Getriebe kleiner, kompakter gebaut werden kann. Zur Erzeugung eines Rückwärtsganges ist kein Rücklaufrad nötig.
Die Vorteile von Planetengetrieben gegenüber anderen Getriebebauarten zur Drehzahl- und Momentenumwandlung liegen einerseits in der Möglichkeit einer Änderung des Übersetzungsverhältnisses unter Last, d.h. ohne Unterbrechung des Kraftflusses, und anderseits in ihrer kompakten Größe bei vergleichbarer Übersetzung. Zudem sind koaxiale Richtungsumwandlungen möglich.
Anwendung
Am bekanntesten sind wegen der hohen Verbreitung Nabenschaltungen an Fahrrädern. Diese basieren ausnahmslos auf Planetengetrieben.
Untersetzungsgetriebe
Planetengetriebe ermöglichen große Übersetzungsstufen und große Drehmomente, da die mehrfachen Planeten die Leistung teilen und übertragen. Charakteristisch für solche Getriebe ist, dass sie nur einen Eingang und einen Ausgang haben, die koaxial liegen. Da sie dabei auch das Ausgangsmoment verändern, muss ein Teil des Getriebes festgehalten werden (Momentenstütze). Dazu gibt es vielfältige Anwendungsbeispiele:
In den Antriebsnaben von Lkws, Bussen sowie in Bau- und Landmaschinen werden sie zur Untersetzung verwendet (Außenplanetenachse).
In der Regel werden in klassischen Automatikgetrieben für Kraftfahrzeuge mehrere hintereinandergeschaltete Planetengetriebe verwendet, z. B. einfache Planetenradgetriebe, Ravigneaux- oder Simpson-Satz. Zum Gangwechsel wird durch Öffnen und Schließen von Kupplungen und Bremsen eine andere Übersetzung geschaltet. Dies geschieht als Lastschaltung, es gibt keine Zugkraftunterbrechung.
Summiergetriebe
Bei einem Summiergetriebe werden zwei Leistungen zu einer zusammengefasst. Ein Beispiel dafür ist ein Schiffspropeller, der von zwei Motoren über ein Summiergetriebe angetrieben wird.
Im Pkw-Bereich wurden so auch Überlagerungsgetriebe vorgestellt, bei denen der Verbrennungsmotor und ein Elektromotor gemeinsam Antriebsleistung für einen Beschleunigungsvorgang liefern. Läuft der Elektromotor zunächst rückwärts, dann lässt sich sogar eine kupplungslose Anfahrregelung darstellen. Auch lassen sich stufenlose Lenkübersetzungen emulieren, wenn ein Elektromotor über ein Summiergetriebe der Lenkradbewegung überlagert wird (z.B. bei BMW).
Andere Anwendungen haben einen Motor, der große Leistungen bei konstanter Drehzahl liefert. Mit einem kleineren Motor, der sich leicht in der Drehzahl regeln lässt, und einem Summiergetriebe kann auf diese Art in einem kleinen Bereich eine Drehzahländerung am Ausgang erreicht werden. Einsatzbereich wären z. B. Walzwerke, um die Geschwindigkeiten bei der Umformung zu regeln.
Im Flugzeugbau sind Anwendungen bekannt, bei denen aus Sicherheitsgründen zwei Elektromotoren eine Kraftstoffpumpe über ein Summiergetriebe antreiben. Fällt einer der Motoren aus, kann der andere immer noch die Pumpe antreiben, wenngleich sich die Gesamtleistung halbiert.
Leistungsverzweigung
Klassischer Anwendungsfall für leistungsverzweigende Planetengetriebe werden in Verteilergetrieben bei Allradfahrzeugen (Zentraldifferenzial, siehe Differentialgetriebe) und in den Achsgetrieben als Achsdifferenzial verwendet.
Als Kupplung
In der Landtechnik werden Planetengetriebe als Kupplungen eingesetzt, z. B um eine Zapfwelle zu schalten. Hierbei wird die Antriebskraft vom Sonnenrad geliefert, und die Abtriebskraft wird vom Planetenträger auf die Zapfwelle übertragen. Das Hohlrad dreht sich frei, dadurch kann keine Kraft vom Sonnenrad auf den Planetenträger also auf die Zapfwelle übertragen werden. Wenn das Hohlrad durch ein Bremsband abgebremst und angehalten wird, kann die Kraft vom Sonnenrad auf den Planetenträger übertragen werden und die Zapfwelle dreht sich.
Andere Anwendungen
Mit Kombinationen von Planetengetrieben lässt sich auch der Leistungsbereich von stufenlosen Getrieben erweitern (allerdings bei reduziertem Drehzahlband). Zunächst wird die Antriebsleistung mit einem Planetengetriebe aufgeteilt. Ein Nebenzweig mit geringerer Leistung wird über ein stufenloses Getriebe zu einem zweiten Planetengetriebe geführt, wo es dann mit der Leistung aus dem Hauptzweig des ersten Planetengetriebes wieder summiert wird.
Bei Kompressionsdrehriegeln
Durch das Planetengetriebe wird bei Drehriegeln ein höherer Kompressionshub ermöglicht: zehn bis zwölf Millimeter sind dadurch möglich, im Gegensatz zu sechs bis acht Millimetern bei den herkömmlichen Lösungen. Die kugelförmige Konstruktion des Planetengetriebes mit zahnradähnlicher Führung kommt dabei auch dem Anpressdruck zugute: Die Schließkraft des Drehriegels wird stärker, es wird eine größtmögliche Kraft aufgebaut. Vorne wird stets mit der gleichen Kraft gearbeitet, derweil im Inneren eine Kraft bis ins Unendliche aufgebaut werden kann.
Die Berechnung ist mit dem Kutzbachplan möglich
Übersetzungstabelle
Folgende Übersetzungen sind möglich:
| Antrieb / Abtrieb | Hohlrad fest | Antrieb / Abtrieb | Sonnenrad fest | Antrieb / Abtrieb | Planetenradträger fest |
|---|---|---|---|---|---|
| Planetenradträger / Sonnenrad |  |
Hohlrad / Planetenradträger |  |
Sonnenrad / Hohlrad | i = i12 |
| Sonnenrad / Planetenradträger | i = 1 − i12 | Planetenradträger / Hohlrad |  |
Hohlrad / Sonnenrad |  |

{kind=link}
Standübersetzung  (bei einem einfachen Planetenradsatz negativ)
(bei einem einfachen Planetenradsatz negativ)
zH = Zähnezahl Hohlrad (negativ); zS = Zähnezahl Sonnenrad
Literatur
- Hugo Klein: Die Planetenrad-Umlaufrädergetriebe.
- Fritz Winkler, Siegfried Rauch: Fahrradtechnik Instandsetzung, Konstruktion, Fertigung. 10. Auflage, BVA Bielefelder Verlagsanstalt GmbH & Co. KG, Bielefeld, 1999,ISBN 3-87073-131-1
Siehe auch
- Planetenrollengewindetriebe in der Lineartechnik
- Wittenstein AG